illumination cameras microscopy / objectives filters / accessories liquid lens / specialty telecentric fixed focal length resource guide
Getting Started: Best Practices for Better Imaging
4 +44 (0) 1904 788600 | Edmund Optics® targets Whether your application is in machine vision, life sciences, security,
or traffic solutions, understanding the fundamentals of imaging
technology significantly eases the development and deployment
of sophisticated imaging systems. While advancements in sensor
and illumination technologies suggest limitless system capabilities,
there are physical limitations in the design and manufacture
of these technologies. Optical components are not an exception to
such limitations, and optics can often be the limiting factor of system
performance. The content provided in this guide is designed to
help specify an imaging system, maximize system performance, and
minimize cost.
Imaging Resource Guide
Compiled are several simple best practices for creating sophisticated,
cost-effective imaging systems useful to most applications.
While the list is nearly exhaustive and should be used when designing
any imaging system, each application is unique and may require
extra consideration.
u #1: Allow ample room for the imaging system.
Understanding a system’s space requirements before building is especially
crucial for high-resolution and high-magnification requirements.
Advancements in camera technology continue to yield exceptionally
small sized consumer cameras. However, these advancements do
little to benefit even intermediate-level industrial imaging systems—
partially because of size limitations. Many applications require complex
light geometries, large diameter-long length lenses, and large
cameras, in addition to cabling and power sources required to operate
equipment. Avoid sacrificing performance by considering spatial
feasibility during project planning. Specify the requirements of a project’s
vision system first. It is typically easier to arrange electronics and
mechanics around the optical portion than otherwise. It is important
to note that the illumination scheme is part of the vision system and
that the object under inspection may require the use of large or numerous
light sources, such as a diffuse dome (see Best Practice #4).
u #2: Don’t believe your eyes.
The human eye and brain work together to form an extremely advanced
imaging and analysis system capable of filling in information
not necessarily present. Additionally, the way in which humans see
and process contrast is fundamentally different than imaging systems.
Software analysis must be used to ensure image quality and performance
requirements are met. Images that look good to a human may
not actually be sufficient.
u #3: Don’t get too close.
Due to the constraints of physics, attempting to image fields of view
(FOV) too large, relative to a lens’s working distance (WD), places excessive
demands on the design of the optical components, decreasing
system performance and increasing the need for imaging processing
and the time in which processing is done. It is recommended that
a lens be chosen such that the WD is roughly two to four times as long
as the desired FOV width to maximize performance while minimizing
cost and complexity. Remember Best Practice #1 and consider the imaging
system’s space requirement before building the system.
This practice also applies to the relationship between sensor size and
focal length. It is best to have focal length-to-sensor diagonal ratios of
2:1 to 4:1 to maximize performance.
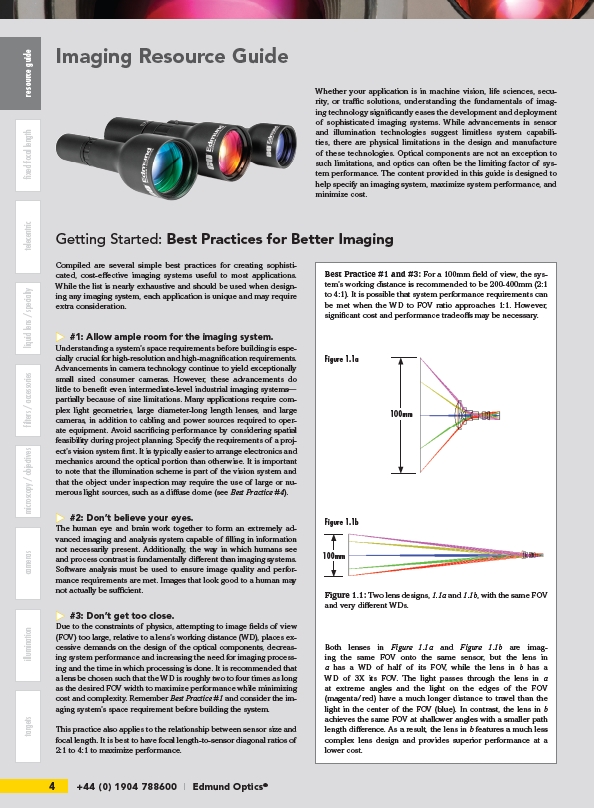
Best Practice #1 and #3: For a 100mm field of view, the system’s
working distance is recommended to be 200-400mm (2:1
to 4:1). It is possible that system performance requirements can
be met when the WD to FOV ratio approaches 1:1. However,
significant cost and performance tradeoffs may be necessary.
Figure 1.1a
Figure 1.1b
100mm
100mm
Figure 1.1: Two lens designs, 1.1a and 1.1b, with the same FOV
and very different WDs.
Both lenses in Figure 1.1a and Figure 1.1b are imaging
the same FOV onto the same sensor, but the lens in
a has a WD of half of its FOV, while the lens in b has a
WD of 3X its FOV. The light passes through the lens in a
at extreme angles and the light on the edges of the FOV
(magenta/red) have a much longer distance to travel than the
light in the center of the FOV (blue). In contrast, the lens in b
achieves the same FOV at shallower angles with a smaller path
length difference. As a result, the lens in b features a much less
complex lens design and provides superior performance at a
lower cost.